

「はやぶさ2」便り3 ~ みちびきの光再び ~
(2018年11月15日)

3回目リハーサル時 CAM-H(小型モニターカメラ)により撮影
2018年10月25日、11:47(日本時間)に上昇を開始した直後(高度約21m)から5秒ごとに撮影(上昇直後の静止画)
(JAXA提供)
前回11月1日のコラムをこうしめた
そして「はやぶさ2」のメインイベントが始まろうとしている・・・・・しかしそれまでの路はまだ遠かった
本稿ではタッチダウンとサンプル採取の結果を書くはずだった。しかし、10月11日に「第1回目のタッチダウンを2019年1月へ延期する」との発表が行われた。そして急遽2回目、3回目のタッチダウンリハーサルが行われることになった。リュウグウは簡単に「はやぶさ2」の表面への降下を許さなかった。
2回目のリハーサルでは、高度30m以下で、前回は確認できなかったLRF1)(レーザレンジファインダー)の動作確認を、3回目のリハーサルでは高度20m以下までの最終降下とLRFによる制御/誘導動作の確認、TM2)(ターゲットマーカー)分離/トラッキングまでを実施することになった。
慎重に、少しずつ高度を下げ、そのデータを見極めて、それに対応する万全の準備をするチームの強い意志が見て取れる。それまでの降下運用で集められた地表面の高分解能画像、ミネルバやマスコットによって得られた表面画像等によって、リュウグウの表面は「砂地に岩(ボルダー)が存在している」という従来のイメージではなく「地面そのものが大小さまざまな岩の集合」(10月11日、プレス発表資料での表現)であることがわかり、タッチダウンに対するハードルがとても高くなったことによっている。
高分解能の画像から狭い範囲のできるだけ平坦な場所を探して、そこに10mくらいのピンポイントでタッチダウンさせようとする戦略への転換がなされた。
■2回目リハーサル(10月15日)
・高度22mまで降下
・高い高度で使用する高度計LIDARから、高度30m以下で使用するLRFへデータの連続性確認
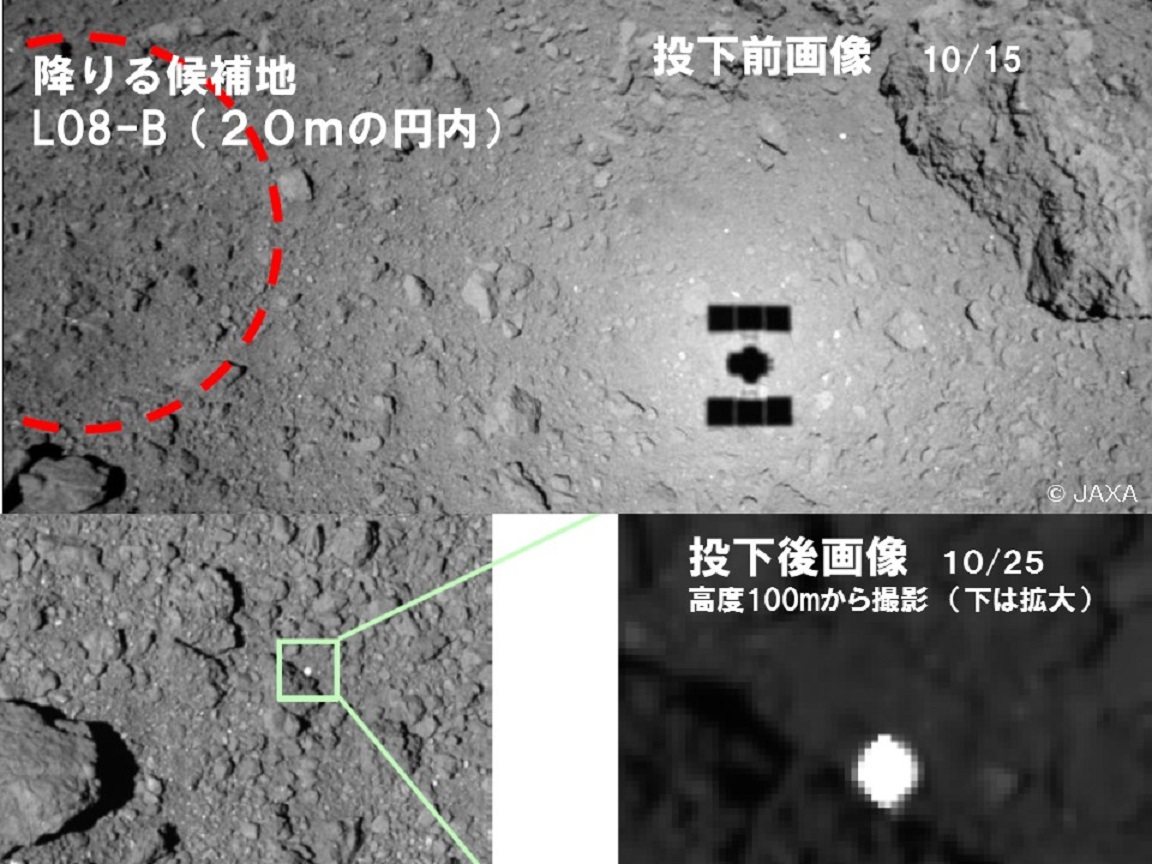
・低高度でタッチダウン予定地点LO8-B(半径10m程度の狭い領域)周辺の高分解能画像取得
■3回目のリハーサル(10月25日)
・高度12mまで降下
・LRFによる誘導動作を確認
・CAM-H(小型モニターカメラ)による連続撮影
・TM分離、LO8-B領域の5mほど外側に投下された
・フラッシュ点灯によるトラッキング動作の確認
TMにフラッシュ光をあびせて、その光にみちびかれてTM上空まで移動、静止(ホバリング)して上昇に移るというタッチダウンに必要な一連の動作が確認された
“ターゲットマーカ”誕生までの物語は以下の記事を参照
「 お手玉から導きの光へ 」
https://jpn.nec.com/ad/cosmos/hayabusa/targetmarker/index.html
岩だらけの表面に降下せざるを得ないことを逆バネとして、難度の高い荒地へのピンポイント着陸技術に一気に迫ろうとするはやぶさチームのチャレンジを応援したい。この技術はこれから様々な天体への精密着陸に大いに活きていく技術となるだろう。
さあ、準備はできた。
2019年年明け、“みちびきの光”に導かれ、高度0mへのチャレンジが始まる。
1)LRF レーザレンジファインダー
「はやぶさ2」直下方向に対して30度傾けた4本のレーザビームを照射して、探査機の高度と、表面との傾斜を測定するセンサ
2)TM ターゲットマーカー
大きさ10cmの表面に再帰反射シートをかぶせた球体。無重力に近い小惑星表面でも反発しにくい特性を持つ。本体の降下に先駆けて投下、表面での目印となる
小笠原 雅弘(おがさわら まさひろ)
NEC、チーム「はやぶさ」メンバー。軌道系、航法誘導系担当、特にイトカワへの着陸に使われたターゲットマーカやフラッシュランプを手がけた。1985年にはじめてハレー彗星へ旅した「さきがけ」をはじめ、スイングバイ技術を修得した「ひてん」、月のハイビジョン映像を地球に送り届けた「かぐや」など日本の太陽系探査衛星にずっと携わってきたエンジニア。
現在、NEC航空宇宙システム勤務。