

筋肉を使って細やかな二足歩行をするバイオハイブリッドロボット
(2024年3月01日)
二足歩行ロボットや四足歩行をするロボットなど、さまざまなロボットが研究されていますが、その中で近年盛んに研究されているものの1つに、バイオハイブリッドロボットがあります。これは生物が持っている機能と機械的な機能の両方の要素を合わせ持つもので、従来のロボットでは実現できなかった機能を持たせることができます。
東京大学大学院情報理工学系研究科の竹内 昌治(たけうち しょうじ)教授らと早稲田大学理工学術院の森本 雄矢(もりもと ゆうや)准教授らの研究グループは、培養(ばいよう)によって作成した生体の筋肉の1つである骨格筋組織(こっかくきんそしき)を模倣(もほう)したものを作成し、この筋収縮運動(きんしゅうしゅくうんどう)を利用して動く二足歩行ロボットを開発しました。この二足歩行ロボットの足は生き物の足の筋肉と同じように作動し、筋肉が収縮を繰り返すことで足を屈曲(くっきょく)させて歩きます。
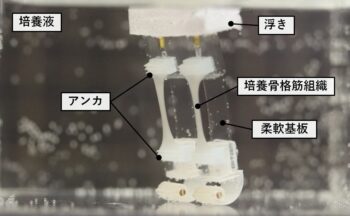
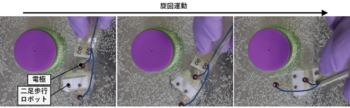
このロボットは、生体のような柔軟な基盤を持つポリジメチルシロキサン(PDMS)製の足に、歩行動作を実現させるための「重り」、培養液中で姿勢を維持させるための「浮き」、及び培養骨格筋から構成されています。培養骨格筋に電気刺激を与えると人工筋肉が収縮し、それによってPDMS製の足が屈曲をくり返し歩行を行うというものです。「重り」は歩くときの軸足を固定する役目をしていて、これがあることで細やかな回転運動が行えるようになりました。「重り」によって2本ある足の片方を軸足とすることで、ロボットの身体の内側に旋回軸(せんかいじく)を設けることができ、細やかな回転を行うことが可能になったといいます。実際に測定してみたところ、このロボットの回旋率(かいせんりつ、ロボット長/回転半径)は、これまでのロボットの5倍を超える2.1となっていたということです。このような細かな動作が実現できたことによって、より自然な二足歩行を達成しました。
これまでのバイオハイブリッドロボットは、匍匐前進(ほふくぜんしん)のように地面に腹ばいになって移動するものや、魚のヒレを模倣して泳ぐものなどが研究されていましたが、二足歩行できるものは今回が初めてといいます。またこれまで作られてきた同種のロボットでは、大きな旋回半径でしか回れませんでしたから、今回、細やかな旋回運動の基本原理を開発したことは貴重な成果といえ、これからのバイオハイブリッドロボットの新しい可能性を示してくれたといえます。
この技術が発展していくことで、生き物に近い感触と動きを持つソフトなロボットの開発につながっていくかもしれません。また生物の運動メカニズムの理解を深めることで、医療の面でも役立つのではないかと研究者は考えています。
【参考】
■東京大学プレスリリース
世界初!筋肉で動く二足歩行ロボット ~培養骨格筋組織による細やかな旋回動作の実現~

サイエンスライター・白鳥 敬(しらとり けい)
1953年生まれ。科学技術分野のライター。月刊「子供の科学」等に毎号執筆。
科学者と文系の普通の人たちをつなぐ仕事をしたいと考えています。